最近的学习中关于四元数和万象锁出现的频率比较高,因此认真学习了,做个笔记。
在正式讨论之前,我们需要了解一些基础概念。譬如欧拉角。
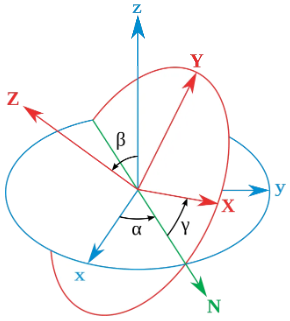
- \alpha (进动角) 是 x - 轴与交点线的夹角
- \beta (章动角) 是 z - 轴与 Z - 轴的夹角
- \gamma (自旋角) 是交点线与 X - 轴的夹角。
简单点来说,就是分别围绕 轴进行旋转的角度。可以用来描述三维空间中的物体旋转。但是欧拉角又有静态和动态之分。
静态欧拉角,即以固定的参考系(又称实验室参考系)来进行旋转。譬如,我们旋转一个物体,不管一个物体怎么旋转,我们整体的参考系并不会发生变化。
但静态欧拉角对于描述场景中的物体旋转并不方便,譬如一个立方体使用世界坐标系(静态欧拉角)进行旋转后,我们只需要立方体根据其自己 z 轴再进行旋转,静态欧拉角便很难进行描述。
因此我们还需要可以独立描述物体旋转的欧拉角,也就是动态欧拉角。即这时物体的 xyz 轴应该是跟着物体发生变化的。
注意,动态欧拉角的旋转顺序对于物体最终选择是有影响的,所以只有固定的顺序(同时也正是这个顺序导致了后续的万向锁问题)才能确定物体最终的旋转姿态。因为当第一次旋转发生时,它的其余坐标轴位置也发生了改变。
欧拉角旋转,在计算机中通常实现为 Y -> X -> Z。关于 Unity 中的旋转顺序网上资料参差不齐,有人说是 YXZ,也有人说是 ZXY。我们不妨自己打开 Unity 来试一下。
我们先绕 Z 轴(蓝色)旋转 30 度。假设 Unity 的旋转顺序是 ZXY,那么此时我们旋转 X 轴,应该会和我们想象的一样,绕红轴进行旋转。
很明显,立方体并非绕着 X 轴旋转,它最后的姿态,应该是先进行了 X 轴旋转,再对应进行了 Z 轴旋转。
我们再做一次实验。先绕 X 轴旋转 30 度,再旋转 Z 轴。
我们可以看到这次立方体很好地绕着 Z 轴旋转。同理再试验一下与 Y 轴的对比,因此我们可以得到顺序是 YXZ。
万向锁一旦选择 ±90° 作为 pitch 角,就会导致第一次旋转和第三次旋转等价,整个旋转表示系统被限制在只能绕竖直轴旋转,丢失了一个表示维度。
万向锁纯读定义来说,确实有些让人费解。
如果你喜欢从数学上理解,不妨点击此处读一读 krasjet 大佬的数学解释 。而我则从我更直观的感受上进行介绍。做个 1 分钟的物理实验即可。
首先请读者拿出平时最常使用的手机,然后确定手机的物体坐标系朝向,假设 z 轴与手机屏幕垂直(手机平放于桌面)指向上方,手机较短的一条边为 x 轴,较长的一条边为 y 轴(方向由手机尾部指向头部),物体坐标系的原点是手机左下角的顶点。(注意旋转顺序为 zyx)
绕 z 轴旋转任意角度(注意 x 和 y 轴也跟着一起旋转),再绕 y 轴旋转 90°,再绕 x 轴旋转任意角度。通过多次尝试,会发现一个共同点:z 轴永远是水平的, 通俗的说,手机永远也不会立起来(旋转形成的三维空间是固定的)!本来以为手机会指向任何方向,但实际上手机好像是被锁在桌面上,只能指向水平的某个方向,这个现象就称为万向锁。
动态欧拉角必须按顺序旋转特性的一个体现,而万向锁正是一个极端案例。
那么我们如何解决这个问题呢?
这就涉及到了四元数的概念。
借助视频很容易理解复数和四元数的几何意义,非常值得一看。如果你是一个数学爱好者,文字版的数学公式推导证明在此处。
我学习之后的总结概括如下。
简而言之,我们可以从四元数的几何意义出发去理解。四元数就好比四维世界的数字。
复数
复数的基本形式是 ,比如 就是一个复数。它有一个虚数单位 ,定义是 。
我们将其看作普通的平面坐标系,实数部分放置于 x 轴,虚数部分放置于 y 轴。
乘以一个复数相当于将其逆时针旋转 90 度,即此时由 变到了 。继续逆时针旋转 90 度, 变为了 ,也就是。所以复数相乘,就好比做矩阵变化(旋转 + 拉伸)。
同理将其扩展到四元数,便好比在三维空间做变换(旋转 + 拉伸)。
四元数乘法:(这也是我们告诉计算机该如何去计算它)
对于矩阵乘法,四元数乘法更加简洁
四元数
比如写一个四元数:( Hamilton 用了一个特殊的词来称呼没有标量部分只有 分量的四元数,一个之前没有在数学和物理中出现过的词,向量(Vector)。)
对于旋转来说,我们通常使用单位四元数。
单位四元数:
相当于绕 j 轴旋转了 。
这时,只会对变换的向量进行旋转,而不会改变其本身的大小。(模长)
作用:避免了欧拉角的歧义问题。
- 优点:四元数旋转不受万向锁的影响。
- 局限性:单个四元数不能表示任何方向超过 180 度的旋转。
- 局限性:四元数的数字表示在直观上难以理解。
我想从更加直观地感受上来描述一下,我们为什么使用四元数?
回顾一下,正如上文所说,单位四元数可以起到的作用是对三维空间物体进行旋转。
而我们想要描述物体旋转,对于用户来说,欧拉角是最直观的方式。
对于游戏引擎等来说,我们通常有一个世界坐标系,同时也希望子物体也有自己的坐标系,以便我们单独旋转子物体。这时我们不得不使用动态欧拉角。
但是动态欧拉角有缺陷,因为它必须依照固定旋转顺序(如 YXZ),才能真正确定一个旋转。因此各种仿真模拟软件通常会有其自己的固定顺序,即便用户用不同的顺序去设置 XYZ,最后也根据软件自己实现的顺序来展示物体的旋转。
这样才能保证 XYZ 值,只确定一个旋转。
因为旋转顺序固定,所以产生了万向锁。
因此我们需要一个东西它可以唯一确定并表达旋转,于是我们用到了四元数。
但对于用户来说,旋转场景中的物体要自己计算设置四元数显然是不友好的,因此 Unity 等方案都是在内部存储为四元数,而为了用户方便操作理解,UI 面板上则仍然使用欧拉角表示旋转(因此我们可以在软件里复现万向锁的表现),但我们只要自己知道旋转顺序,就可以在设置的时候避开它,设置出自己想要的旋转。



